A decision tree classifier is a supervised Machine Learning Method and a type of classifier that is one of the simplest algorithms that can be used for both regression and classification problems. Therefore, every aspiring Data Scientist and Machine Learning Engineer must know these questions and answers on Decision Trees.
In this article, we will discuss the most important Decision Tree interview questions,which are helpful to get you a clear understanding of the techniques, and also for Data Science Interviews, which cover all topics from its fundamentals to complex level concepts.
Learning Objectives
This article was published as a part of the Data Science Blogathon
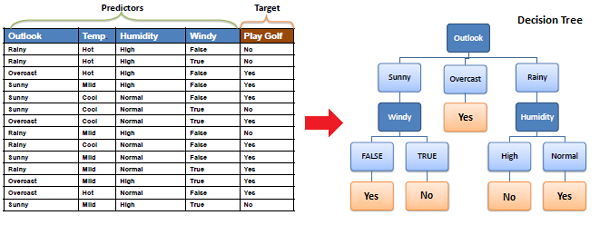
A Decision Tree is a supervised machine-learning algorithm that can be used for both Regression and Classification problem statements. It divides the complete dataset into smaller subsets while, at the same time, an associated Decision Tree is incrementally developed.
A machine learning model like a decision tree can be easily trained on a dataset by finding the best splits to make at each node. The Decision Trees’ final output is a Tree with Decision nodes and leaf nodes. A Decision Tree can operate on both categorical and numerical data.
Unlike Deep Learning, Decision Trees are easy to interpret and understand, making them a popular choice for decision-making applications in various industries. You can create a decision tree model with a programming language like Python using the scikit-learn library or with R. code.
Source: Google Images
Some of the popular algorithms used for constructing decision trees are:
The CART stands for Classification and Regression Trees, is a greedy algorithm that greedily searches for an optimum split at the top level, then repeats the same process at each of the subsequent levels.
Moreover, it verifies whether the split will lead to the lowest impurity, and the solution provided by the greedy algorithm is not guaranteed to be optimal. It often produces a reasonably good solution since finding the optimal Tree is an NP-Complete problem requiring exponential time complexity.
As a result, it makes the problem intractable even for small training sets. This is why we must choose a “reasonably good” solution instead of an optimal one.
The most widely used algorithm for building a Decision Tree is called ID3. ID3 uses Entropy and Information Gain as attribute selection measures to construct a Decision Tree.
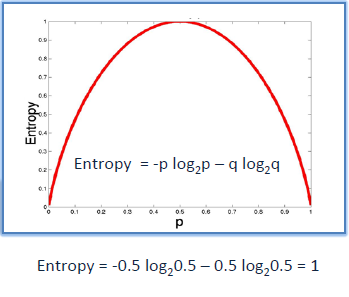
1. Entropy: A Decision Tree is built top-down from a root node and involves the partitioning of data into homogeneous subsets. To check the homogeneity of a sample, ID3 uses entropy. Therefore, entropy is zero when the sample is completely homogeneous, and entropy of one when the sample is equally divided between different classes.
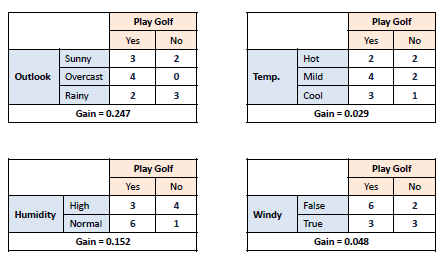
2. Information Gain: Information Gain is based on the decrease in entropy after splitting a dataset based on an attribute. The meaning of constructing a Decision Tree is all about finding the attributes having the highest information gain.
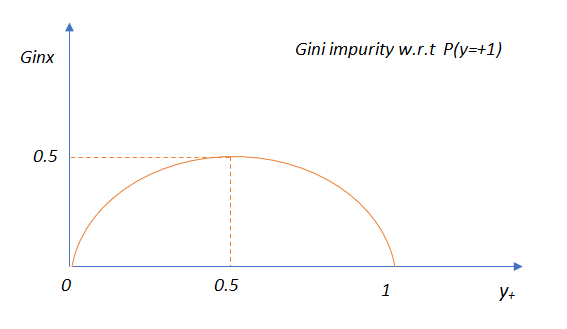
Let X (discrete random variable) takes values y₊ and y₋ (two classes). Now, let’s consider the different cases:
Case- 1: When 100% of observations belong to y₊ . Then, the Gini impurity of the system would be:

Case- 2: When 50% of observations belong to y₊ . Then, the Gini impurity of the system would be:

Case- 3: When 0% of observations belong to y₊ . Then, the Gini impurity of the system would be:

After observing all these cases, the graph of Gini impurity w.r.t to y₊ would come out to be:
The CART algorithm produces only binary Trees: non-leaf nodes always have two children (i.e., questions only have yes/no answers).
On the contrary, other Tree algorithms, such as ID3, can produce Decision Trees with nodes having more than two children.
In reality, most of the time, it does not make a big difference: they lead to almost similar Trees. Gini impurity is a good default while implementing in sklearn since it is slightly faster to compute. However, when they work differently, then Gini impurity tends to isolate the most frequent class in its own branch of the Tree, while entropy tends to produce slightly more balanced Trees.
The Decision Tree consists of the following different types of nodes:
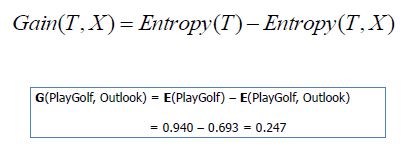
Information gain is the difference between the entropy of a data segment before and after the split, i.e., reduction in impurity due to the selection of an attribute.
Some points to keep in mind about information gain:
Mathematically, the information gain can be computed by the equation as follows:
Information Gain = E(S1) – E(S2)
– E(S1) denotes the entropy of data belonging to the node before the split.
– E(S2) denotes the weighted summation of the entropy of children nodes by considering the weights as the proportion of data instances falling in specific children nodes.
Decision Trees are mainly intuitive, easy to interpret, and require fewer data preparation. In fact, they don’t require feature scaling or centering(standardization) at all. Such models are often called white-box models. Decision Trees provide simple classification rules based on if and else statements that can even be applied manually if necessary.
For Example, Flower classification for the Iris dataset.
Information gain is defined as the reduction in entropy due to the selection of a particular attribute. Information gain biases the Decision Tree against considering attributes with a large number of distinct values, which might lead to overfitting.
The information Gain Ratio is used to solve this problem.
Decision Trees are suitable for the following cases:
Time and Space complexity for Training:
In the training stage for features (dimensions) in the dataset, we sort the data, which takes O(n log n) time, following which we traverse the data points to find the right threshold, which takes O(n) time. Subsequently, for d dimensions, the total time complexity would be:
Usually, while training a decision tree, we identify the nodes, which are typically stored in the form of if-else statements, due to which training space complexity is O(nodes).
Time and Space Complexity for Testing:
Moreover, the testing time complexity is O(depth) as we have to traverse from the root to a leaf node of the decision tree, i.e., testing space complexity is O(nodes).
As we know that the computational complexity of training a Decision Tree is given by O(n × m log(m)). So, when we multiply the size of the training set by 10, then the training time will be multiplied by some factor, say K.
Now, we have to determine the value of K. To finds K, divide the complexity of both:
K = (n × 10m × log(10m)) / (n × m × log(m)) = 10 × log(10m) / log(m)
For 10 million instances, i.e., m = 106, then we get the value of K ≈ 11.7.
Therefore, we can expect the training time to be roughly 11.7 hours.
Decision Trees handle missing values in the following ways:
Decision Trees handle continuous features by converting these continuous features to a threshold-based boolean feature. To decide the threshold value, we use the concept of Information Gain, choosing the threshold that maximizes the information gain.
The ID3 algorithm preferred Shorter Trees over longer Trees. In Decision Trees, attributes with high information gain are placed close to the root and are preferred over those without. In the case of decision trees, the depth of the trees is the inductive bias. If the depth of the tree is too low, then there is too much generalization in the model.
The goal of the feature selection while building a Decision Tree is to select features or attributes (Decision nodes) which lead to a split in children nodes whose combined entropy adds up to lower entropy than the entropy value of the data segment before the split. This implies higher information gain.
The three measures, in general, returns good results, but:
A node’s Gini impurity is generally lower than that of its parent as the CART training algorithm cost function splits each of the nodes in a way that minimizes the weighted sum of its children’s Gini impurities. However, sometimes it is also possible for a node to have a higher Gini impurity than its parent. Still, in such cases, the increase is more than compensated by a decrease in the other child’s impurity.
For a better understanding, let’s consider the following Example:
Consider a node containing four samples of class A and one sample of class B.
Then, its Gini impurity is calculated as 1 – (1/5)2 – (4/5)2= 0.32
Now suppose the dataset is one-dimensional, and the instances are arranged in the manner: A, B, A, A, A. We can verify that the algorithm will split this node after the second instance, producing one child node with instances A and B, and the other child node with instances A, A, and A.
Then, the first child node’s Gini impurity is 1 – (1/2)2 – (1/2)2 = 0.5, which is higher than its parent’s. This is compensated for by the other node being pure, so its overall weighted Gini impurity is 2/5 × 0.5 + 3/5 × 0 = 0.2, which is lower than the parent’s Gini impurity.
After we create a Decision Tree, we observe that most of the time, the leaf nodes have very high homogeneity, i.e., properly classified data. However, this also leads to overfitting. Moreover, if enough partitioning is not carried out, it would lead to underfitting.
Hence, the major challenge is finding the optimal trees that result in the appropriate classification having acceptable accuracy. So to cater to those problems, we first make the decision tree and then use the error rates to prune the trees appropriately. Boosting can also be used to increase the accuracy of the model by combining the predictions of multiple weak learners into a stronger learner.
Decision Trees are not sensitive to noisy data or outliers since extreme values or outliers never cause much reduction in the Residual Sum of Squares(RSS) because they are never involved in the split. Decision Trees are generally robust to outliers. Due to their tendency to overfit, they are prone to sampling errors. If sampled training data is somewhat different than evaluation or scoring data, then Decision Trees tend not to produce great results.
The process of removing sub-nodes of a Decision node is called pruning, which is the opposite process of splitting. The two most widely used techniques for pruning are Post and Pre-Pruning.
Post Pruning:
Pre Pruning:
Note: Below are the advantages and disadvantages of the decision tree algorithm, which is an important interview question on machine learning.
1. Clear Visualization: This algorithm is simple to understand, interpret and visualize as the idea is mostly used in our daily lives. The output of a Decision Tree can be easily interpreted by humans.
2. Simple and easy to understand: Decision Tree works in the same manner as simple if-else statements, which are very easy to understand.
3. This can be used for both classification and regression problems.
4. Decision Trees can handle both continuous and categorical variables.
5. No feature scaling required: There is no requirement for feature scaling techniques such as standardization and normalization in the case of a Decision Tree, as it uses a rule-based approach instead of calculating distances.
6. Handles nonlinear parameters efficiently: Unlike curve-based algorithms, the performance of decision trees can’t be affected by non-linear parameters. So, if there is high non-linearity present between the independent variables, Decision Trees may outperform as compared to other curve-based algorithms.
7. Decision Tree can automatically handle missing values.
8. Decision Tree handles the outliers automatically; hence they are usually robust to outliers.
9. Less Training Period: The training period of decision trees is less than that of ensemble techniques like Random Forest because it generates only one Tree, unlike the forest of trees in the Random Forest.
1. Overfitting: This is the major problem associated with Decision Trees. It generally leads to overfitting the data, ultimately leading to wrong predictions for testing data points. It keeps generating new nodes to fit the data, including even noisy data, making the Tree too complex to interpret. In this way, it loses its generalization capabilities. Therefore, it performs well on the training dataset but starts making a lot of mistakes on the test set.
2. High variance: As mentioned, a Decision Tree generally leads to the overfitting of data. Due to the overfitting, there is more likely a chance of high variance in the output, leading to many errors in the final predictions and high inaccuracy in the results. So, achieving zero bias (overfitting) leads to high variance due to the bias-variance tradeoff. You can use an ensemble learning method like Bagging to reduce the prediction variance and make the model more robust to noisy or outlier data points.
3. Unstable: Adding new data points can lead to the regeneration of the overall Tree. Therefore, all nodes need to be recalculated and reconstructed.
4. Not suitable for large datasets: If the data size is large, then one single Tree may grow complex and lead to overfitting. So, in this case, we should use Random Forest instead, an ensemble technique of a single Decision Tree.
Decision trees are simple to interpret and visualize. Also, they can handle both categorical and numerical data. Decision trees can handle non-linear relationships between variables and are robust to outliers. These factors make it a popular choice for various applications in artificial intelligence and machine learning, like natural language processing (NLP), computer vision, and predictive analytics.
Decision trees are useful in situations where the relationship between the features and the target variable is non-linear and complex. Still, they can easily overfit the data and produce overly complex models. In some cases, decision trees may provide higher accuracy and be more applicable to real-world problems, while in other cases, linear or logistic regression may perform better. The choice of algorithm will depend on the nature of the problem and the data being analyzed.
Decision trees are known for their simplicity, interpretability, and ease of use but may not be as accurate as neural networks for complex problems. Neural networks are known for their high accuracy; however, they are computationally intensive, making them more difficult to train and implement than decision trees.
Some of the alternative algorithms to decision trees are Random Forest, Gradient Boosting, k-Nearest Neighbors (KNN, it labeled data), Logistic Regression, Support Vector Machines (SVMs), Naive Bayes, and Neural Networks.
The mistakes beginners would usually make when working with decision trees include overfitting the model to the training data, not properly handling missing values, and not considering the possibility of class imbalance. One can avoid these by using techniques such as pruning the tree, imputing missing values, and performing stratified sampling to balance the class distribution.
Decision Trees are a supervised learning machine-learning technique that can be used for both regression and classification problems. You create a tree-based model that splits the data into different branches based on a few conditions. The final prediction is made by traversing the tree and making decisions based on the values of the input variables. Decision Trees can be trained using metrics such as Gini Impurity or Entropy, and their performance can be evaluated using metrics such as accuracy, precision, recall, F1 score, and ROC-AUC, confusion matrix(It shows the number of true positive, true negative, false positive, and false negative predictions made by the model).
You can find more machine learning interview questions covering topics such as unsupervised learning, reinforcement learning, k-means, etc., on the AV blog.
Key Takeaways
Lorem ipsum dolor sit amet, consectetur adipiscing elit,








Very nice 25 Questions! Congratulations! Please answer what is the minimum instances needed for building a CART tree with cross-validation? s
very good questions with adequate explanations.